Bendradarbiaujantis robotinis griebtuvas – ISC vidinis minkštas spaustukas su koboto rankos griebtuvu



Pagrindinė kategorija
Pramoninė roboto ranka / Bendradarbiaujanti roboto ranka / Elektrinis griebtuvas / Pažangi pavara / Automatizavimo sprendimai / koboto rankos griebtuvas / minkštas griebtuvas / roboto rankos griebtuvas
Paraiška

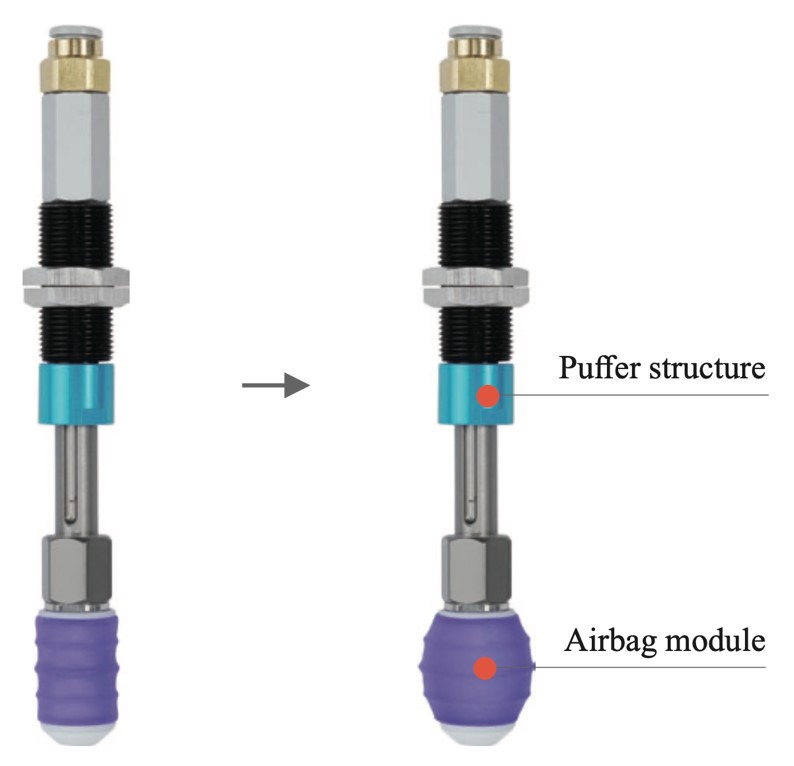
ISC vidinis atraminis spaustukas yra novatoriškas minkštas tvirtinimo elementas, kurio dizainas imituoja pūsliažuvių savigynos morfologiją. Pripučiant oro slėgiu, tvirtinimo elementas gali išsiplėsti ir visiškai išlaikyti vidinę atramą.
Kadangi su ruošiniu besiliečianti dalis yra pagaminta iš minkštos silikoninės gumos, pridėjus slėgį, tarp standaus atraminio paviršiaus ir kontaktinio paviršiaus susidaro „oro pagalvės“ sluoksnis, todėl įtempis yra tolygus ir mažiau tikėtina, kad apdirbamas paviršius bus pažeistas. Be to, galima reguliuoti įeinančio oro slėgį, kad būtų galima valdyti oro pagalvės išsiplėtimą ir įtempimą, liečiantį su ruošiniu, taip žymiai padidinant suėmimo sistemos minkštumą.
Funkcija

· Varomoji žiniasklaida: švarus oras
· Standartinis darbinis tarnavimo laikas: >100 000 kartų
·Maks. veikimo dažnis (cpm): 300
● Vidinis atraminis spaustukas turi specialią oro pagalvės struktūrą ir gali sukelti skirtingą deformaciją kartu su vidiniu slėgiu.
● Įvesties teigiamas slėgis: Įtvirtinimo elementas išsitiesia, savaime prisitaikydamas prie vidinio objekto paviršiaus ir užbaigdamas suėmimą.
● Įvesties neigiamas slėgis: Įrenginys sukuria natūralią būseną ir paleidžia objektus.
SFG minkšti griebtuvai buvo panaudoti su pasaulinio lygio bendradarbiaujančiomis robotų rankomis, įskaitant:

4 ašių horizontalus (SCARA) robotas Delta
Pramoninė roboto ranka Nachi Fujikoshi
4 ašių lygiagretus (Delta) robotas ABB
6 ašių bendradarbiaujantis robotas UR
6 ašių bendradarbiaujantis robotas AUBO



Specifikacijos parametras
ISC oro pagalvės vidinė atrama – tai novatoriškas minkštas tvirtinimo elementas, kurio konstrukcija imituoja pūsliažuvės savigynos morfologiją. Pripučiant oro, tvirtinimo elementas gali išsiplėsti ir visiškai sugriebti vidinę atramą. Kadangi įeinančio oro slėgį galima tiksliai valdyti, galima valdyti tvirtinimo elemento sugriebimo jėgą prie ruošinio, todėl ruošinys nepažeidžiamas.
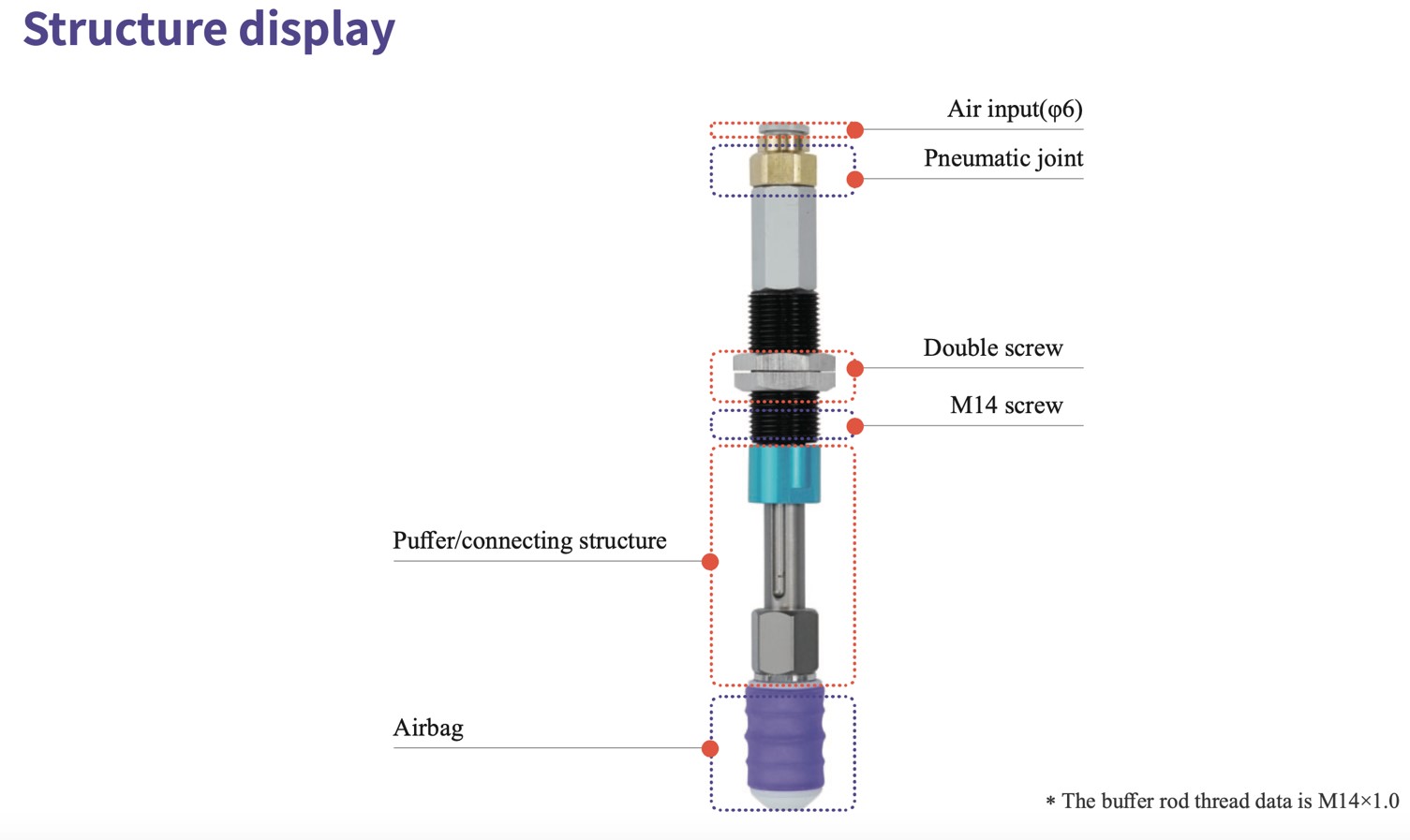
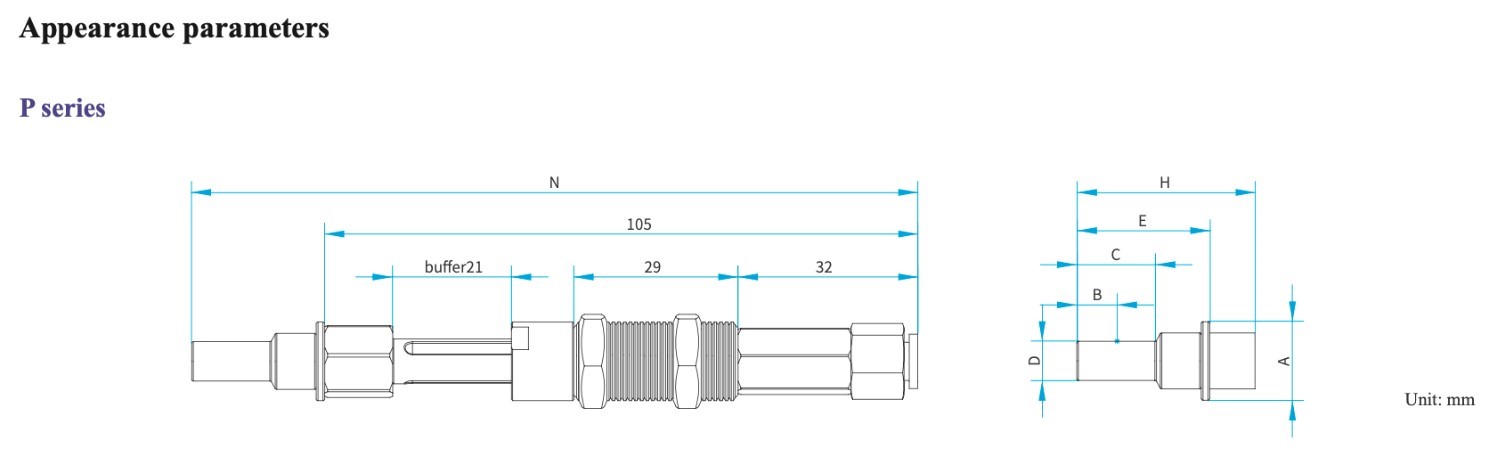
| Modelis | Bendras oro pagalvės modulio aukštis H | Kontaktinio paviršiaus skersmuo D | Konstrukcinės dalies A skersmuo | Aukštis nuo darbinio skersmens iki apačios B | Efektyvaus sąlyčio paviršiaus aukštis C | Oro pagalvės darbinis aukštis E modulis | Bendras ilgis N |
| ISC-P4.5E | 25,5 | 4.5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7.5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7.5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7.5 | 15 | 26,5 | E+105 |
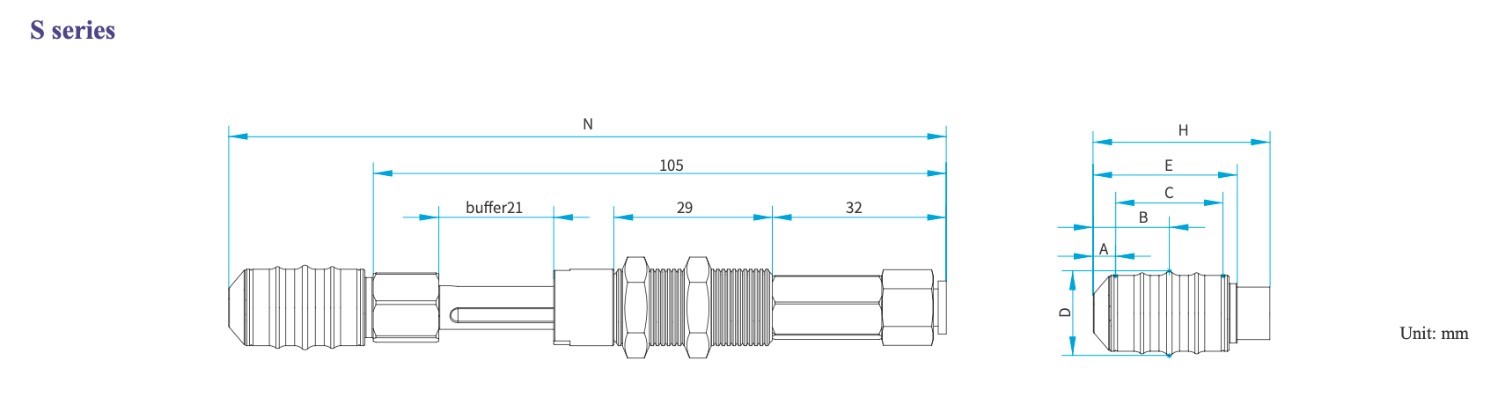
| Modelis | Bendras oro pagalvės modulio aukštis H | Kontaktinio paviršiaus skersmuo D | kreipiamosios aukštis A | Aukštis nuo darbinio skersmens iki apačios B | Efektyvaus sąlyčio paviršiaus aukštis C | Oro pagalvės darbinis aukštis E modulis | Bendras ilgis N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
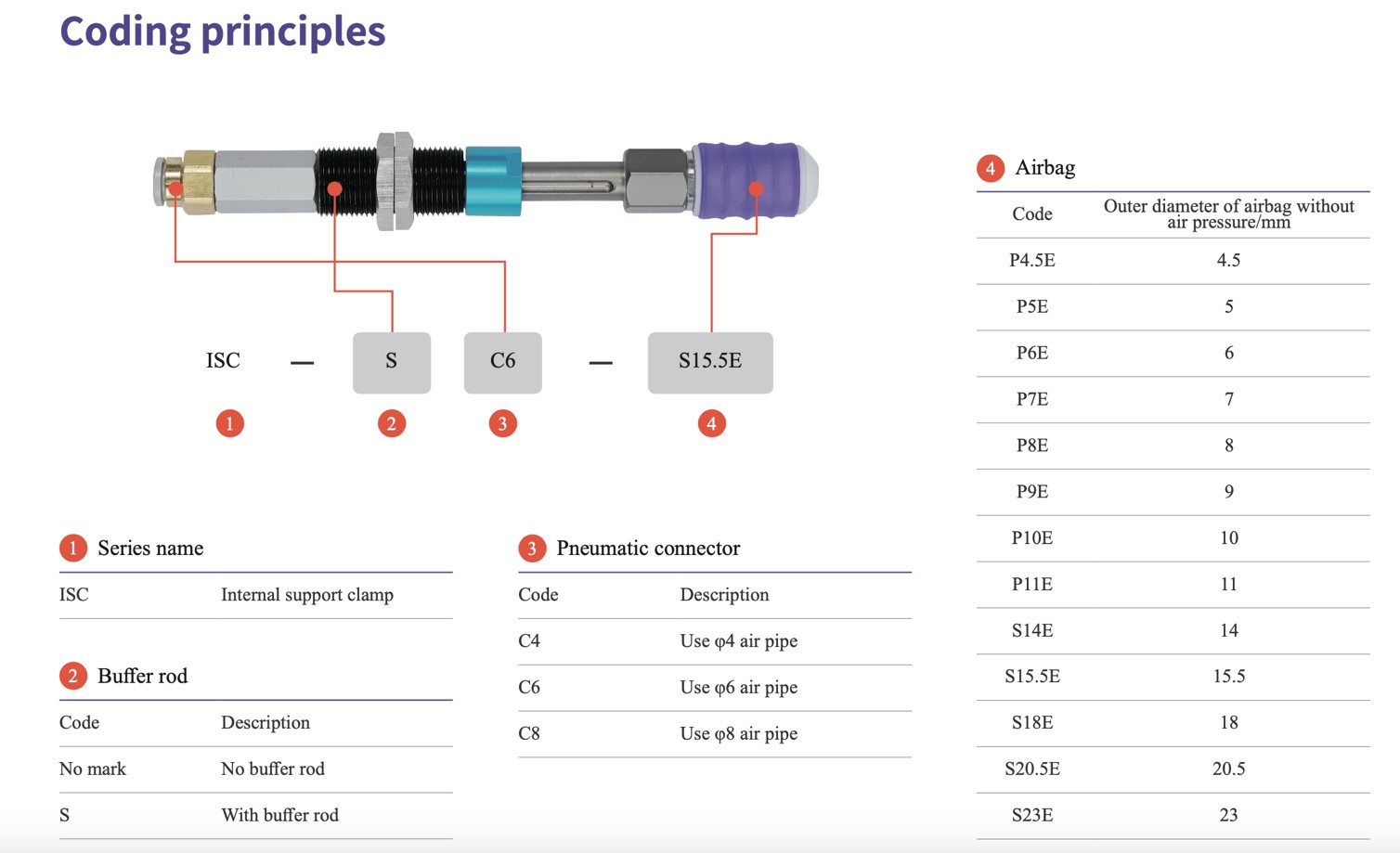
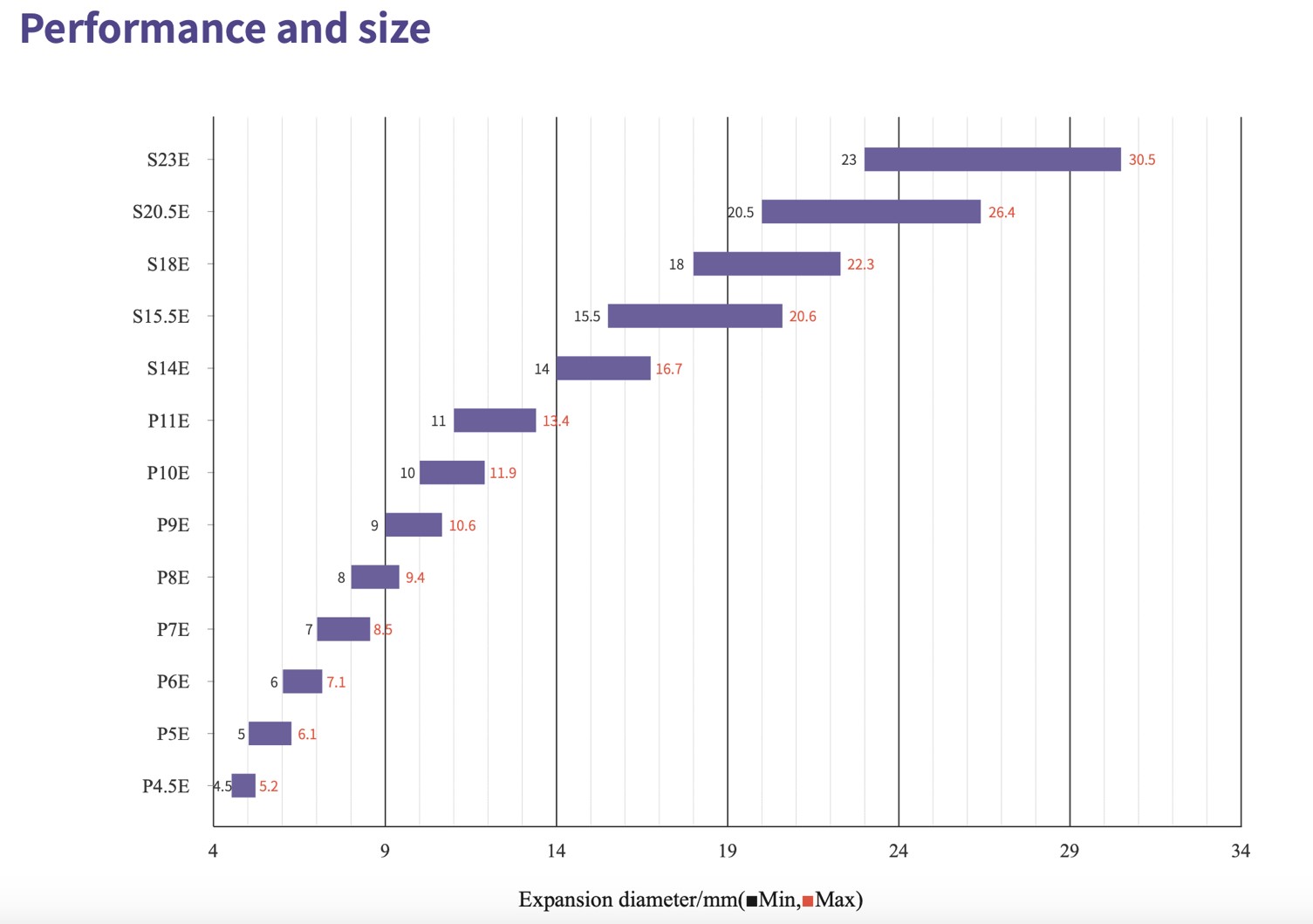
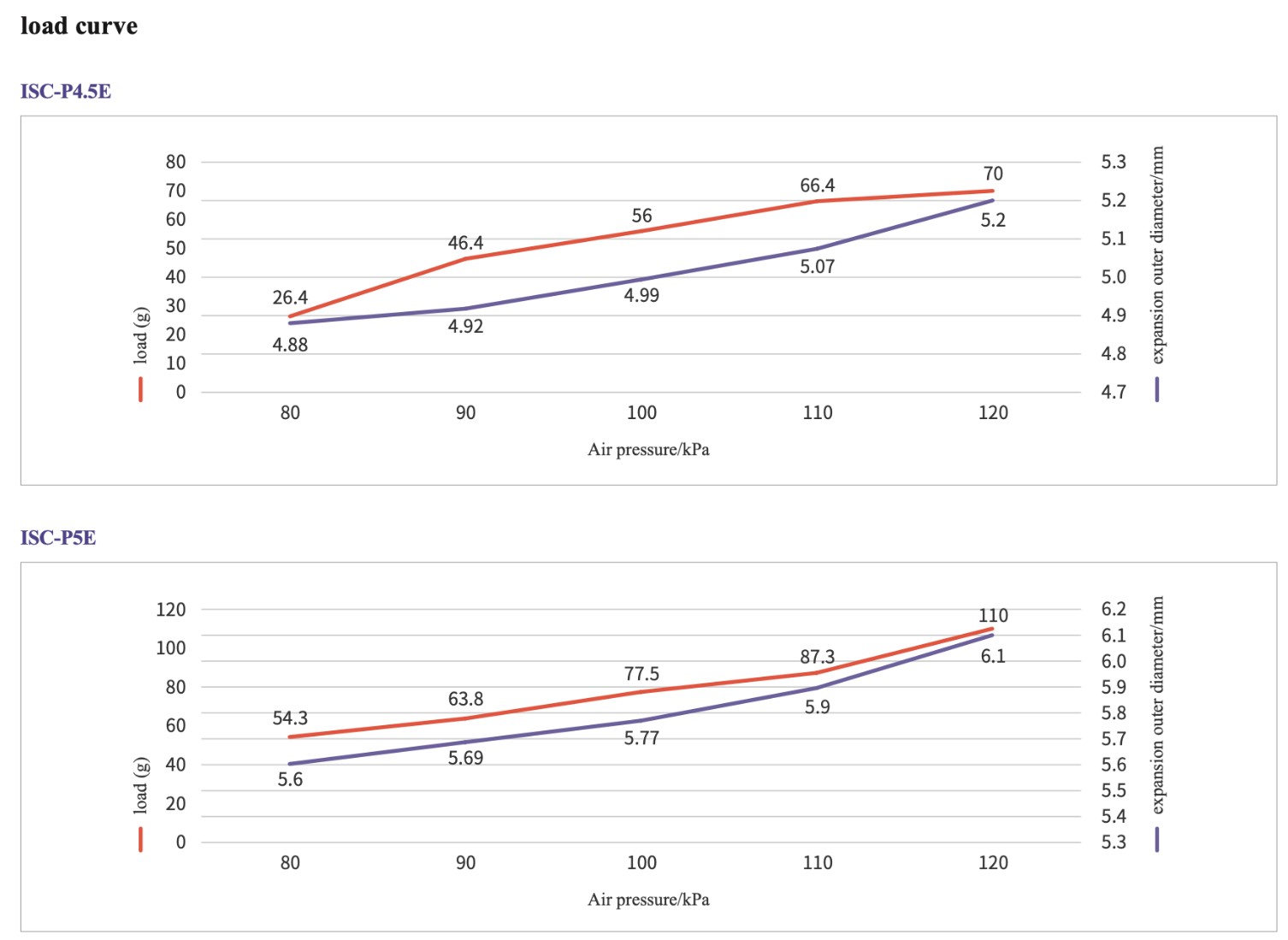
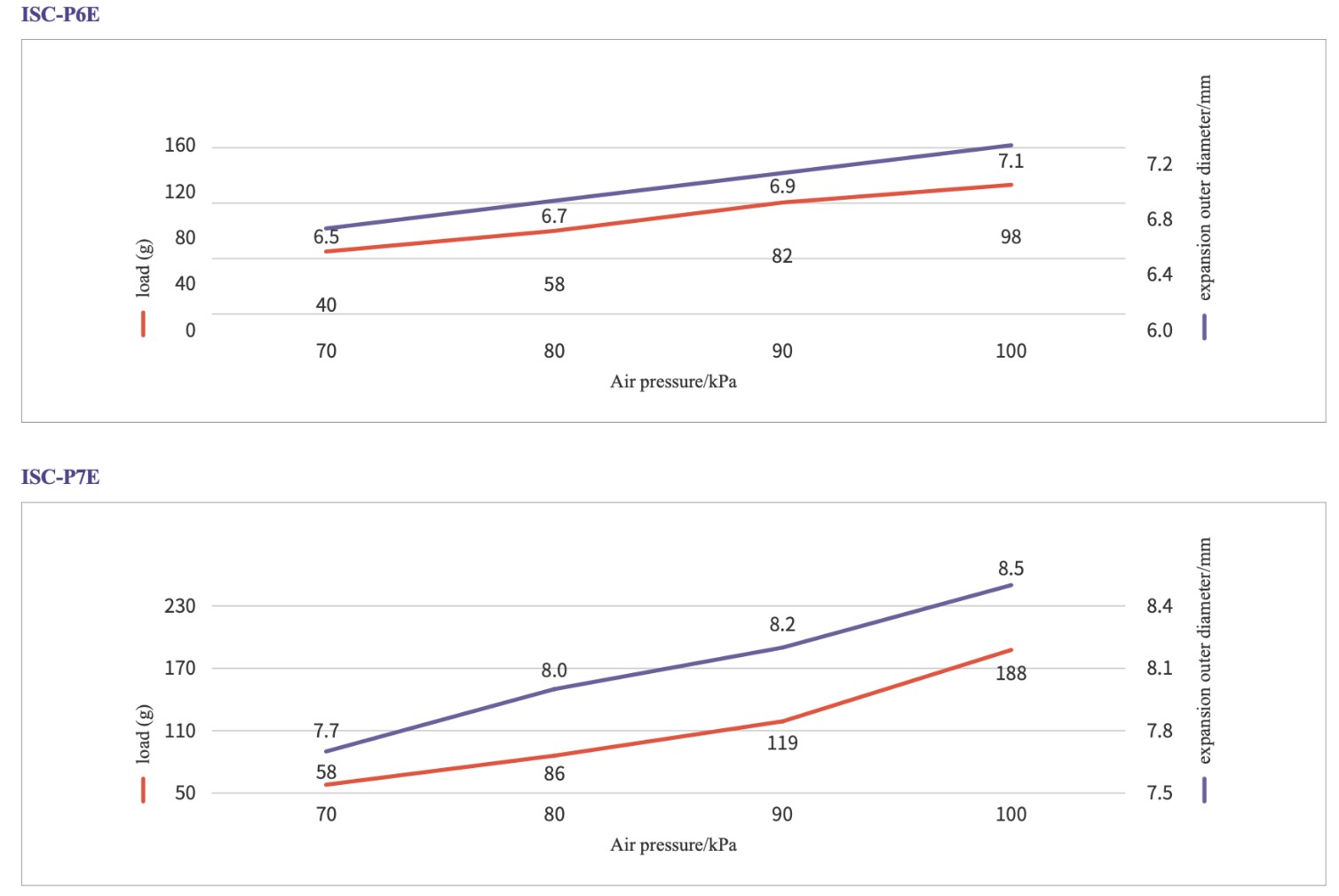
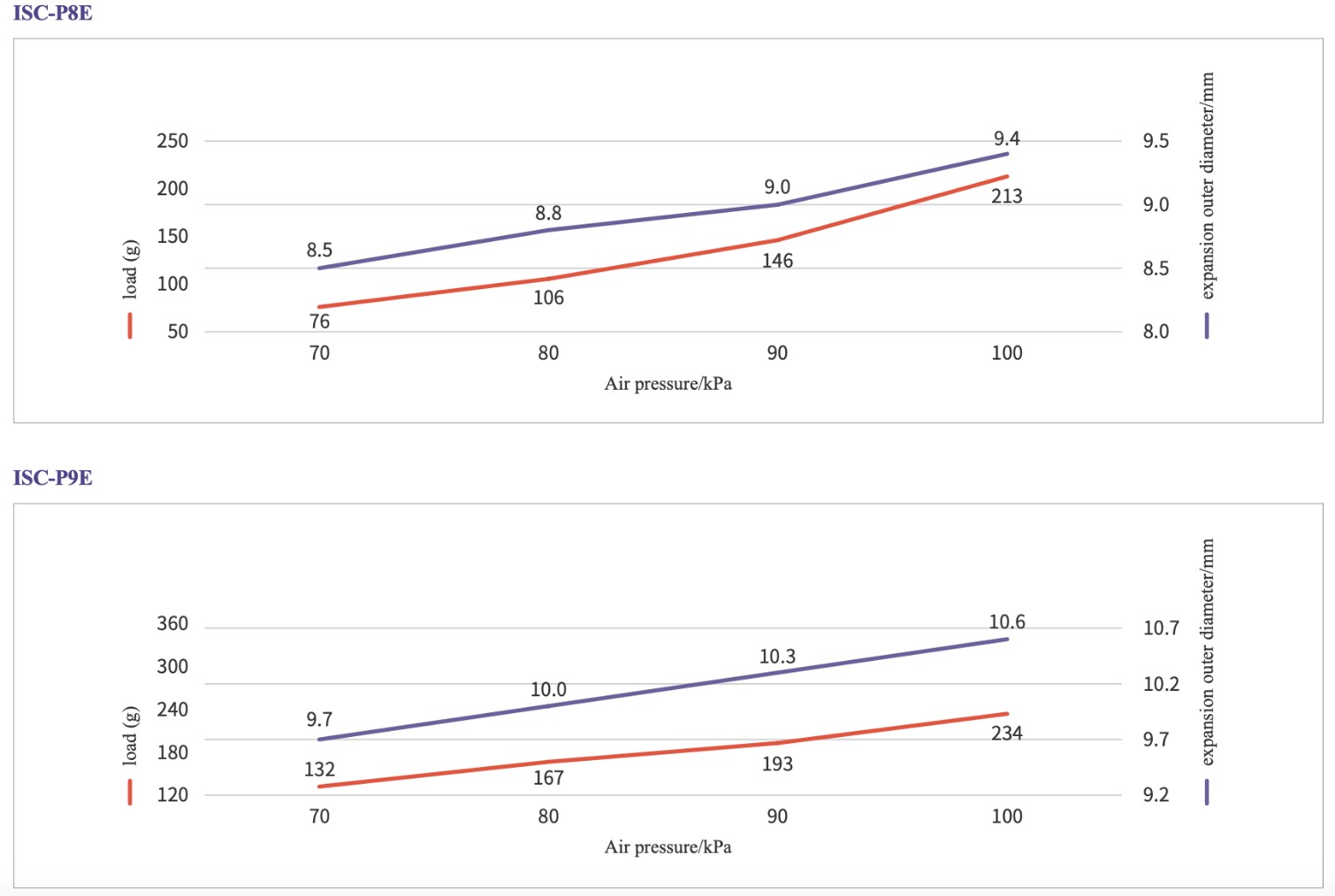
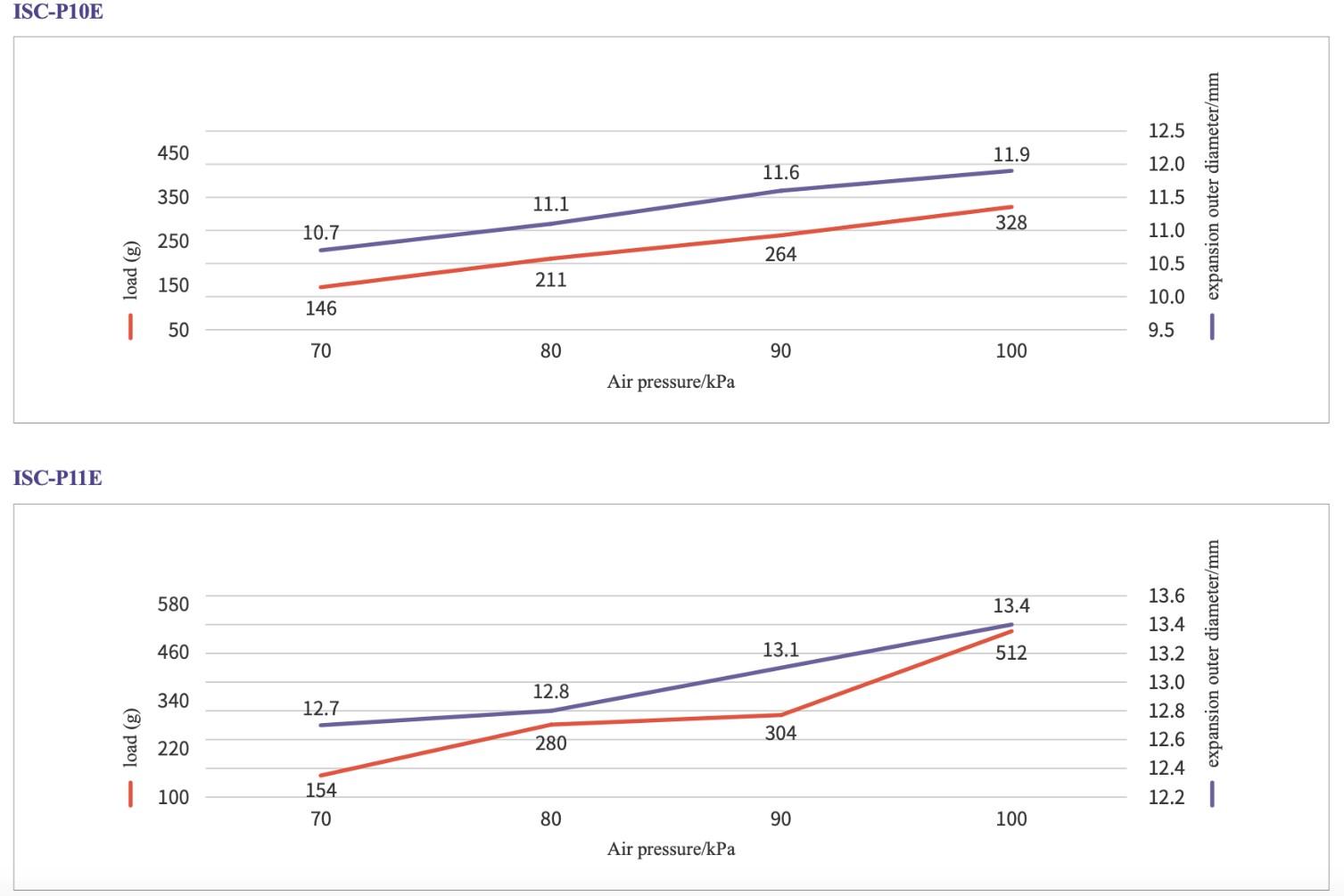
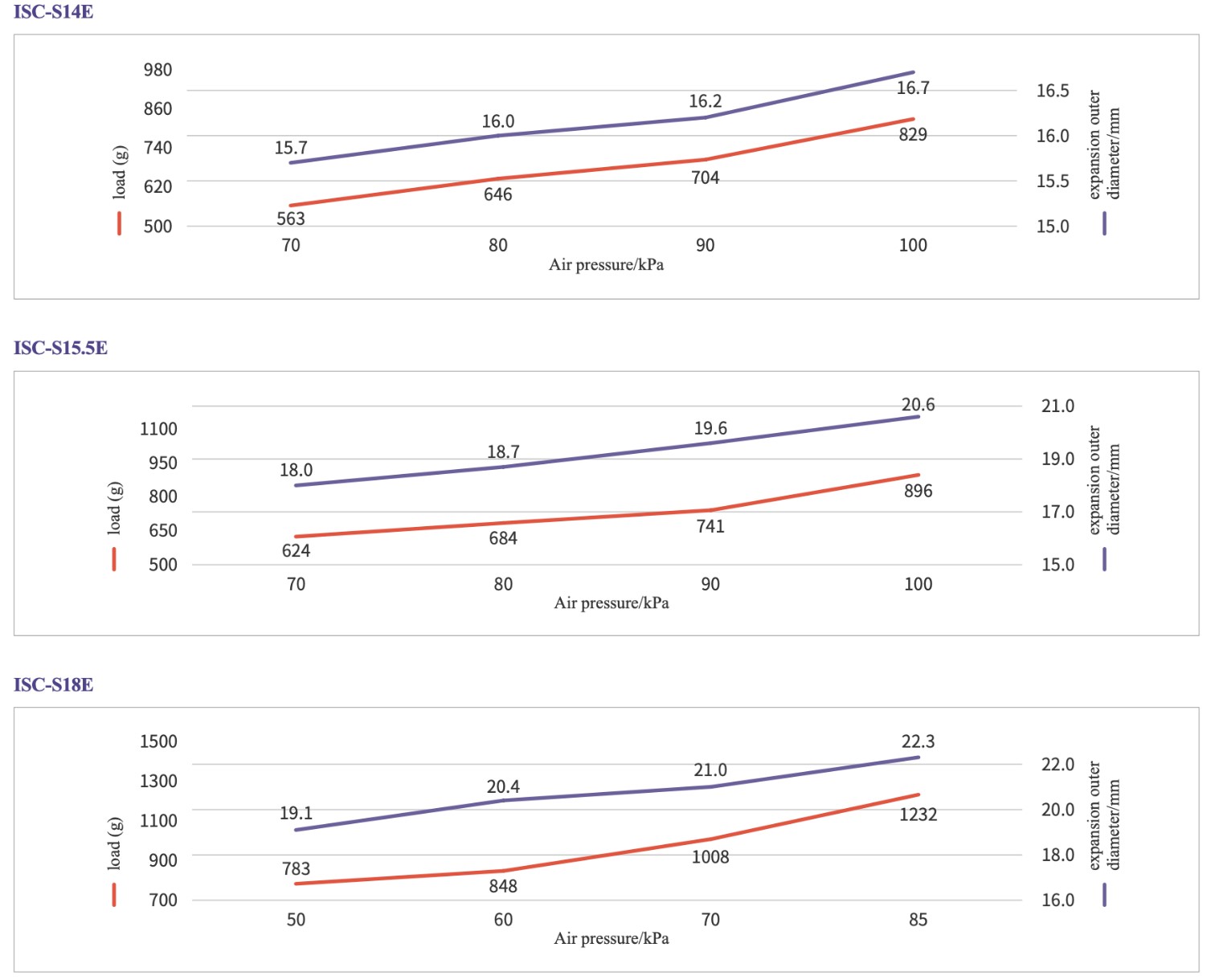
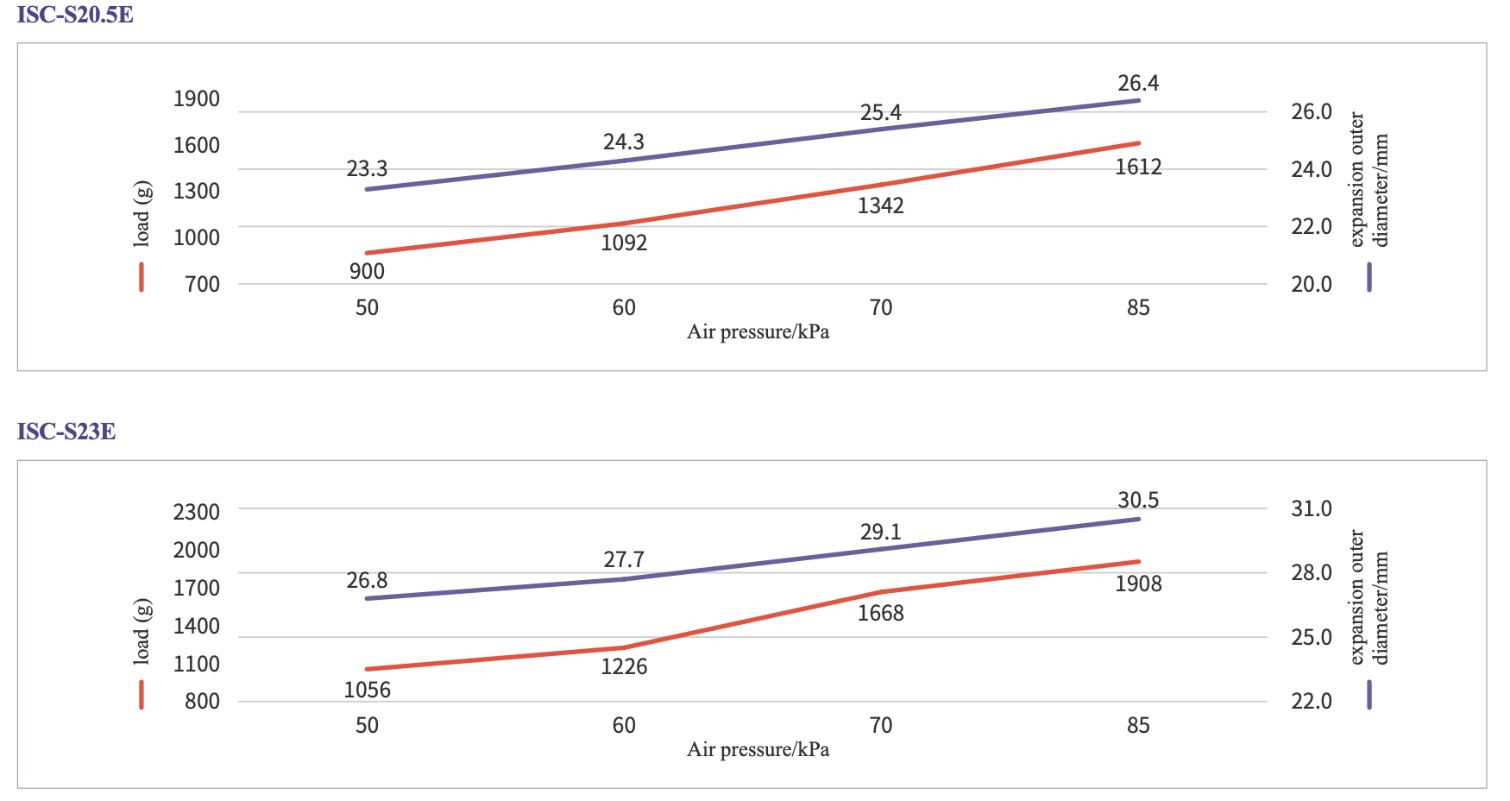
Išplėstas išorinis skersmuo
| Modelis | Darbinio slėgio diapazonas /kPa | Didžiausias išsiplėtimo išorinis skersmuo/mm | Maksimali apkrova/g | Įrenginio svoris/g | Metalinio strypo modelis | Tvirtinimo angos matmuo/mm |
| ISC-SC6-P4.5E | 0–120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0–120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P6E | 0–100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0–100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P8E | 0–100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0–100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P10E | 0–100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0–100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S14E | 0–100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0–100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0–85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S20.5E | 0–85 | 26.4 | 1612 m. | 49 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0–85 | 30,5 | 1908 m. | 51 | VFNT 1421-G18 | 14,5 |
* P serijos maksimalios apkrovos bandymo objektas yra modelio išorinis skersmuo +0,3 mm; S serijos maksimalios apkrovos bandymo objektas yra modelio išorinis skersmuo +1 mm; Apkrovos bandymas matuojamas profesionaliais prietaisais.
Mūsų verslas


Produktų kategorijos
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS RGD SERIJA –...
-

„HITBOT“ ELEKTRINIO GRIEBTUVO SERIJA – Z-EFG-13...
-

GREITO KEIČIMO SERIJA – QCA-200-D1 Greitas...
-

GREITO KEIČIMO SERIJA – QC-200 apvalus rankinis...
-

GREITO KEIČIMO SERIJA – QCA-S100 A Greitas keitimas...
-

GREITO KEIČIMO SERIJA – QCA-S500 A Greitas keitimas...