„HITBOT“ ELEKTRINIŲ GRIEBTUVŲ SERIJA – bendradarbiaujantis elektrinis griebtuvas Z-EFG-R



Pagrindinė kategorija
Pramoninė roboto ranka / Bendradarbiaujanti roboto ranka / Elektrinis griebtuvas / Pažangi pavara / Automatizavimo sprendimai
Paraiška
SCIC Z-EFG serijos robotiniai griebtuvai yra mažo dydžio su įmontuota servo sistema, kuri leidžia tiksliai valdyti greitį, padėtį ir prispaudimo jėgą. Pažangiausia SCIC griebimo sistema automatizavimo sprendimams atvers naujas galimybes automatizuoti užduotis, apie kurias niekada nemanėte, kad įmanoma.

Funkcija

·Mažas, bet galingas elektrinis griebtuvas su servo varikliu.
·Terminalus galima pakeisti, kad jie atitiktų skirtingus projekto reikalavimus.
·Gali pakelti trapius ir deformuojamus daiktus, tokius kaip kiaušiniai, mėgintuvėliai, žiedai ir kt.
·Tinka scenoms be oro šaltinių (pvz., laboratorijoms ir ligoninėms).
Integruota servo sistema, taikoma įvairiems prašymams
Didelė prispaudimo jėga
Prispaudimo jėga: 80 N,
eiga: 20 mm
Tikslumo kontrolė
Pakartojamumas: ±0,02 mm
Prijunk ir žaisk
Specialiai sukurtašešių ašių elektrinis griebtuvas
Valdiklis yra įmontuotas
Apima nedidelį plotą, patogu integruoti.
Uodegą galima pakeisti
Jo uodegą galima pakeisti, kad būtų pritaikyta įvairiems prašymams.
Minkštas prispaudimas
Jis gali suspausti trapius daiktus

● Skatinamas revoliucija keičiant pneumatinius griebtuvus elektriniais – pirmasis elektrinis griebtuvas su integruota servo sistema Kinijoje.
● Puikiai tinka oro kompresoriui + filtrui + solenoidiniam vožtuvui + droselio vožtuvui + pneumatiniam griebtuvui
● Daugkartinis tarnavimo laikas, atitinkantis tradicinį japonišką cilindrą




Specifikacijos parametras
Z-EFG-R yra robotinis elektrinis griebtuvas su integruotu valdikliu ir keliomis funkcijomis viename. Mažas, bet galingas.
● Mažas, bet galingas elektrinis griebtuvas su servo varikliu.
●Terminalus galima pakeisti, kad jie atitiktų skirtingus projekto reikalavimus.
● Gali pakelti trapius ir deformuojamus daiktus, tokius kaip kiaušiniai, mėgintuvėliai, žiedai ir kt.
● Tinka scenoms be oro šaltinių (pvz., laboratorijoms ir ligoninėms).
Z-EFG-R yra mažas elektrinis griebtuvas su integruota servo sistema, jis gali pakeisti siurblį + filtrą + elektroninį magnetinį reguliatorių + droselio sklendę + oro griebtuvą.
| Modelio Nr. Z-EFG-R | Parametrai |
| Bendras smūgis | 20 mm |
| Sugriebimo jėga | 80N |
| Pakartojamumas | ±0,02 mm |
| Rekomenduojamas sukibimo svoris | 0,8 kg |
| Perdavimo režimas | Krumpliaratis + Skersinis ritininis kreiptuvas |
| Judančių komponentų tepalų papildymas | Kas šešis mėnesius arba 1 milijoną judesių / kartą |
| Vienpusio smūgio judesio laikas | 0,45 s |
| Darbinės temperatūros diapazonas | 5–55 ℃ |
| Darbinės drėgmės diapazonas | RH35-80 (be šerkšno) |
| Judėjimo režimas | Du pirštai juda horizontaliai |
| Smūgio kontrolė | Reguliuojamas |
| Prispaudimo jėgos reguliavimas | Reguliuojamas |
| Svoris | 0,5 kg |
| Matmenys (ilgis * plotis * aukštis) | 68 * 68 * 132,7 mm |
| Valdiklio išdėstymas | Įmontuotas |
| Galia | 5W |
| Variklio tipas | Nuolatinės srovės bešepetėlinis |
| Nominali įtampa | 24 V |
| Didžiausia srovė | 1A |
| Prisitaikanti šešių ašių roboto ranka | UR, Aubo |
Vairavimas ir valdiklis yra integruoti
Z-EFG-R yra mažas elektrinis griebtuvas su integruota servo sistema, jis gali pakeisti oro siurblį + filtrą + elektroninį magnetinį vožtuvą + droselio sklendę + oro griebtuvą.


Suderinamas su šešių ašių roboto ranka
Griebtuvas gali būti suderinamas su pagrindine šešių ašių roboto ranka, kad būtų galima naudoti „plug and play“, jo eiga yra 20 mm, prispaudimo jėga yra 80 N, jo eigą ir prispaudimo jėgą galima reguliuoti.
Maža figūrėlė, lanksti montavimui
Z-EFG-R matmenys yra I 68 * P 68 * A 132,7 mm, jo konstrukcija kompaktiška, palaiko kelis montavimo būdus, įmontuotas valdiklis, užima mažai vietos, jį lengva pritaikyti įvairiems tvirtinimo darbams.

Greita reakcija, tikslumo kontrolė
Trumpiausias vieno smūgio judėjimo laikas yra 0,45 s, jo pakartojamumas yra ± 0,02 mm, jo uodegos dalį galima lengvai pakeisti, klientai gali pritvirtinti objektą pagal pageidavimą.
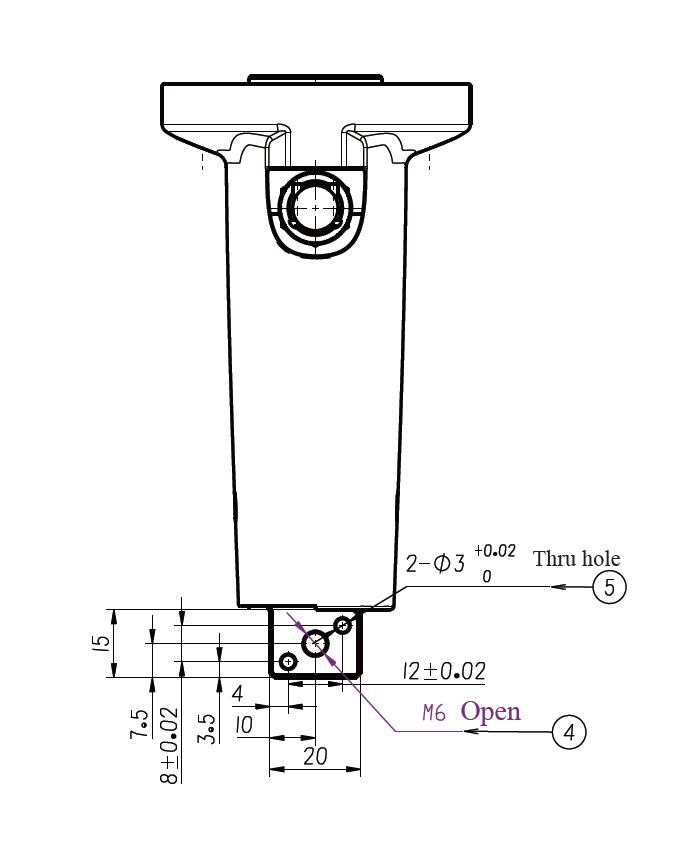
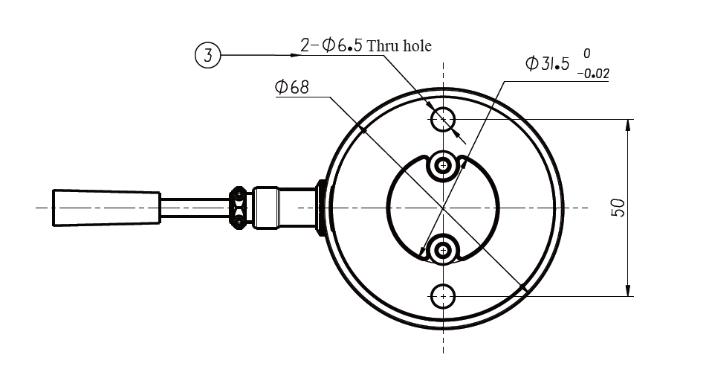
Matmenų diegimo schema
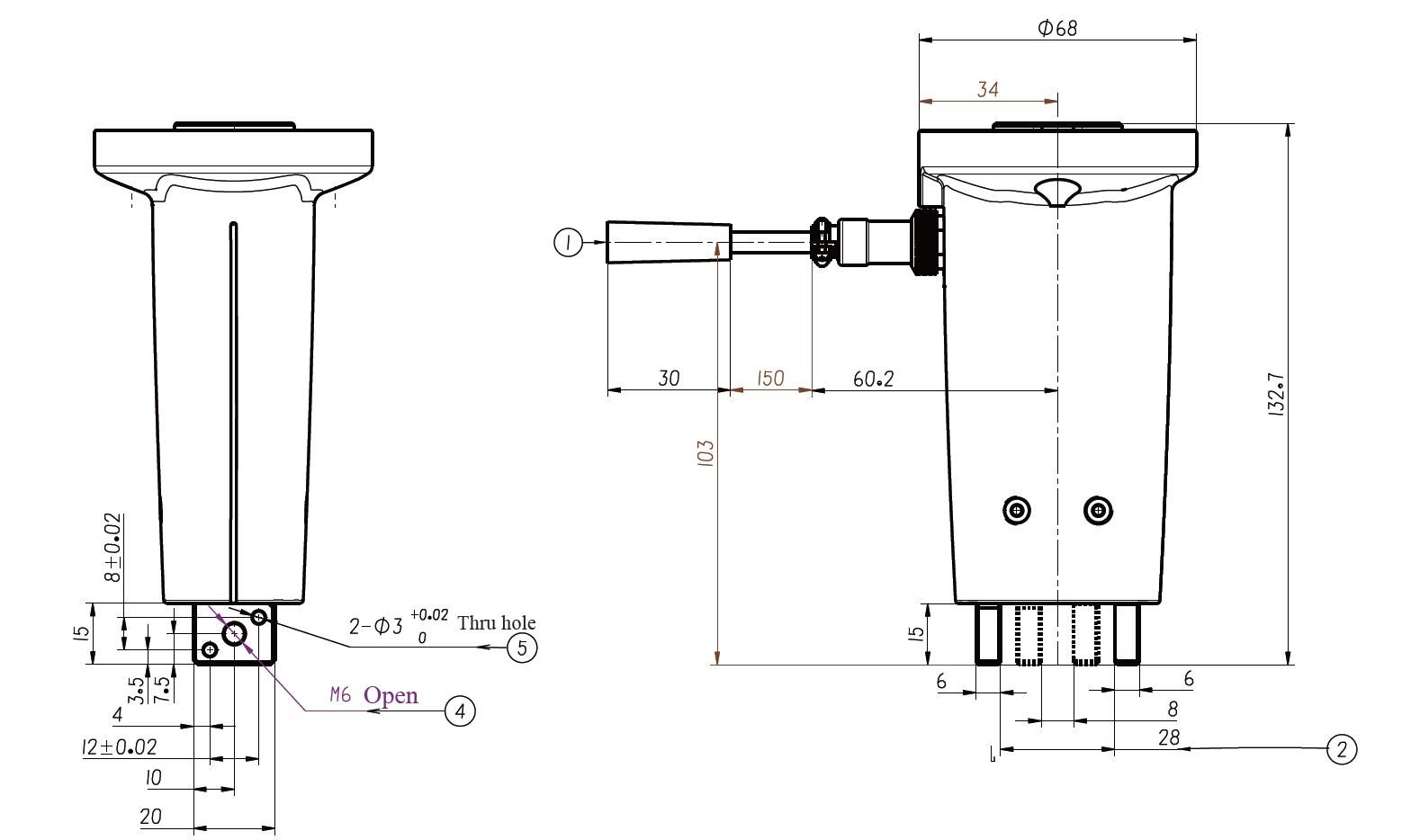
① RKMV8-354 penkių gyslų aviacijos kištukas RKMV8-354
② Elektrinio griebtuvo eiga yra 20 mm
③ Montavimo padėtyje dviem M6 varžtais pritvirtinkite prie UR roboto rankos galo flanšo.
④ Montavimo padėtis, tvirtinimo elemento montavimo padėtis (M6 varžtas)
⑤ Montavimo padėtis, tvirtinimo įtaiso montavimo padėtis (3 cilindrinės kaiščių skylės)
Elektriniai parametrai
Nominali įtampa 24 ± 2 V
Srovė 0,4 A

Mūsų verslas


Produktų kategorijos
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS PGE SERIJA –...
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS RGI SERIJA –...
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS PGE SERIJA –...
-

HITBOT ELECTRIC GRIPPER SERIJA – Z-EFG-50 Paral...
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS RGI SERIJA –...
-

HITBOT ELEKTRINIAI GRIEBTUVAI – Z-EFG-40