GREITO KEITIMO SERIJA – QCA-200 Greito keitimo įrenginys roboto gale


Pagrindinė kategorija
Robotinis įrankių keitiklis / Įrankių keitiklis su svirtimi (EOAT) / Greito keitimo sistema / Automatinis įrankių keitiklis / Robotinių įrankių sąsaja / Roboto pusė / Griebtuvo pusė / Įrankių lankstumas / Greitas atleidimas / Pneumatinis įrankių keitiklis / Elektrinis įrankių keitiklis / Hidraulinis įrankių keitiklis / Tikslus įrankių keitiklis / Saugos fiksavimo mechanizmas / Galinis efektorius / Automatizavimas / Įrankių keitimo efektyvumas / Įrankių keitimas / Pramoninė automatizavimas / Robotiniai įrankiai su svirtimi / Modulinis dizainas
Paraiška
Įrankių galai (EOAT) plačiai naudojami tokiose pramonės šakose kaip automobilių gamyba, 3C elektronika, logistika, liejimas įpurškimu, maisto ir farmacijos pakavimas bei metalo apdirbimas. Pagrindinės jų funkcijos apima ruošinių tvarkymą, suvirinimą, purškimą, tikrinimą ir greitą įrankių keitimą. EOAT žymiai padidina gamybos efektyvumą, lankstumą ir gaminių kokybę, todėl yra esminė šiuolaikinės pramoninės automatizavimo dalis.
Funkcija
Didelio tikslumo
Stūmoklio reguliavimo griebtuvo pusė atlieka padėties nustatymo vaidmenį, o tai užtikrina didelį pakartotinio padėties nustatymo tikslumą. Vieno milijono ciklų bandymai rodo, kad tikrasis tikslumas yra daug didesnis nei rekomenduojama vertė.
Didelio stiprumo
Didelio cilindro skersmens fiksavimo stūmoklis pasižymi didele fiksavimo jėga, o SCIC roboto galinis greitasis įtaisas pasižymi stipria apsauga nuo sukimo momento. Fiksuojant didelio greičio judėjimo metu nebus vibracijos, taip išvengiant fiksavimo gedimų ir užtikrinant pakartotinį padėties nustatymo tikslumą.
Didelis našumas
Siekiant užtikrinti glaudų signalo modulio kontaktą, naudojamas daugiakūgio paviršiaus dizaino fiksavimo mechanizmas, ilgaamžiai sandarinimo komponentai ir aukštos kokybės elastingas kontaktinis zondas.



Specifikacijos parametras
| Greito keitiklio serija | ||||
| Modelis | Maksimali apkrova | Dujų kelias | Fiksavimo jėga @ 80Psi (5,5 Bar) | Produkto svoris |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400 N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000 N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000 N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000 N | 6,2 kg |
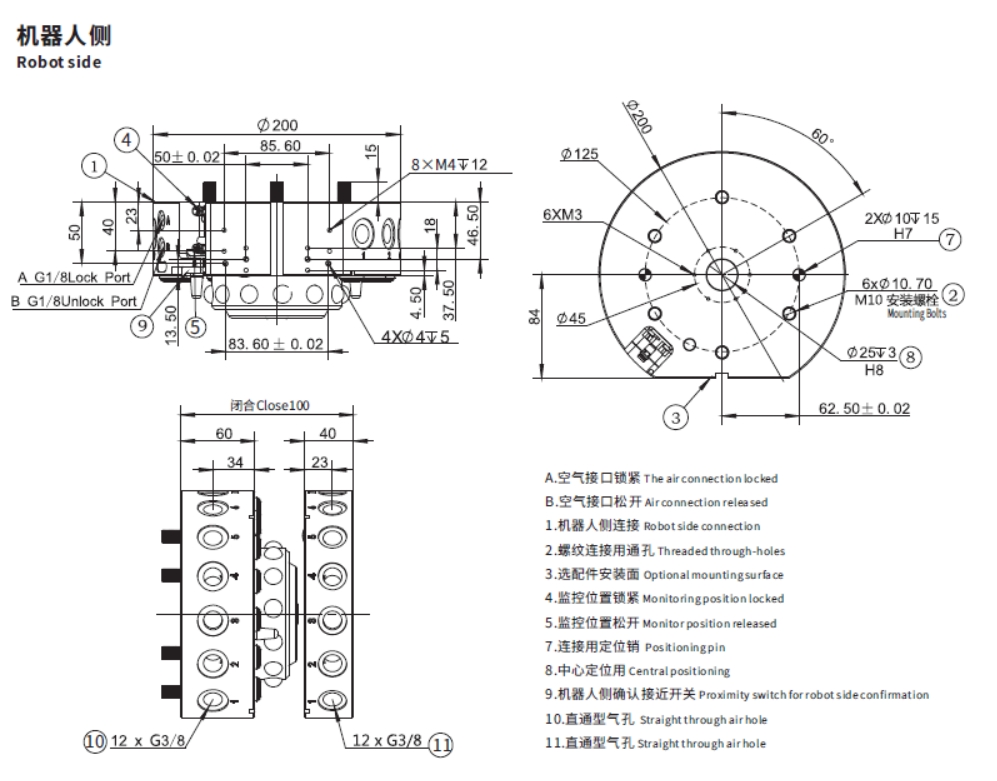
| QCA-200 | 300 kg | 12-G3/8 | 16000 N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000 N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

Roboto pusė

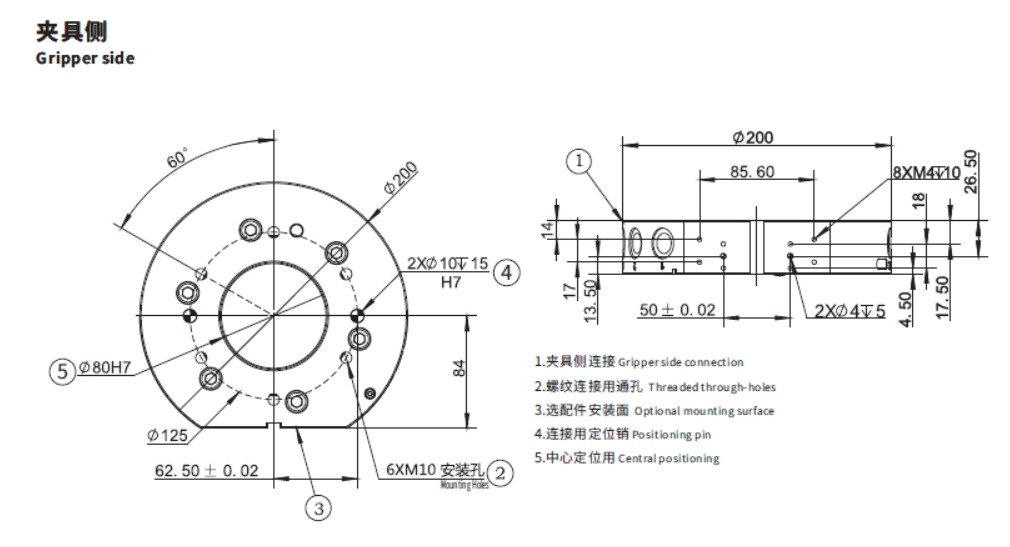
Griebtuvo pusė
Taikomas modulis
Modulio tipas
| Produkto pavadinimas | Modelis | PN | Darbinė įtampa | Darbinė srovė | Jungtis | Jungties PN |
| Roboto pusės signalo modulis | QCSM-15R2 | 7.Y00468 | 24 V | 2,5 A | D-Sub15R2-1000① | 1.Y10080 |
| Griebtuvo pusės signalo modulis | QCSM-15G2 | 7.Y00469 | 24 V | 2,5 A | D-Sub15G2-1000① | 1.Y10081 |
| Roboto pusės signalo modulis | QCSM-08R | 7.Y00477 | 380 V | 30A | 3108A22-23S② | 1.Y10710 |
| Griebtuvo pusės signalo modulis | QCSM-08G | 7.Y00478 | 380 V | 30A | 3108A22-23P② | 1.Y10711 |
| Roboto pusės signalo modulis | QCSM-19R | 7.Y00954 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Roboto pusės signalo modulis | QCSM-19R | 7.Y00954 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Roboto pusės signalo modulis | QCSM-19R1 | 7.Y02123 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Roboto pusės signalo modulis | QCSM-19R1 | 7.Y02123 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Griebtuvo pusės signalo modulis | QCSM-19G | 7.Y00955 | 220 V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Griebtuvo pusės signalo modulis | QCSM-19G | 7.Y00955 | 220 V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Roboto pusės signalo modulis | QCSM-26R | 7.Y00464 | 220 V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Roboto pusės signalo modulis | QCSM-26R | 7.Y00464 | 220 V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Griebtuvo pusės signalo modulis | QCSM-26G | 7.Y00465 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Griebtuvo pusės signalo modulis | QCSM-26G | 7.Y00465 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Griebtuvo pusės signalo modulis | QCSM-21/26G | 7.Y02117 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Griebtuvo pusės signalo modulis | QCSM-21/26G | 7.Y02117 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Roboto pusės signalo modulis | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3116F22-36S② | 1.Y13392 |
| Roboto pusės signalo modulis | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3118F22-36S② | 1.Y13393 |
| Griebtuvo pusės signalo modulis | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3116F22-36P② | 1.Y13394 |
| Griebtuvo pusės signalo modulis | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3118F22-36P② | 1.Y13395 |
① Laido ilgis yra 1 metras ② Tik jungtis, be laido
Pneumatinis prailginimo modulis
| Produkto pavadinimas | Modelis | PN | Dujų kelias | Srieginė skylė |
| Roboto pusės pneumatinis prailginimo modulis | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Griebtuvo pusės pneumatinis prailginimo modulis | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Roboto pusės pneumatinis prailginimo modulis | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Griebtuvo pusės pneumatinis prailginimo modulis | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Roboto pusės pneumatinis prailginimo modulis | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Griebtuvo pusės pneumatinis prailginimo modulis | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Roboto pusės pneumatinis prailginimo modulis | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Griebtuvo pusės pneumatinis prailginimo modulis | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Roboto pusėje savarankiškai paskelbtas pneumatinis prailginimo modulis | QCAM-06G18R-F | 2005 m. liepos mėn. | 6 | G1/8 |
| Griebtuvo pusės savarankiškai paskelbtas pneumatinis prailginimo modulis | QCAM-06G18G-F | 2006 m. liepos mėn. | 6 | G1/8 |
| Roboto pusės pneumatinis prailginimo modulis | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Griebtuvo pusės pneumatinis prailginimo modulis | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Aukšto dažnio modulio tipas
| Produkto pavadinimas | Modelis | PN | Darbinė įtampa | Darbinė srovė |
| Roboto pusės signalo modulis | QCHFM-E14-C1R | 7.Y02003 | 1,4 kV | 5A |
| Griebtuvo pusės signalo modulis | QCHFM-E14-C1G | 7.Y02004 | 1,4 kV | 5A |
Signalo modulis (tinklo kabelio sąsaja)
| Produkto pavadinimas | Modelis | PN |
| Roboto pusės signalo modulis | QCSM-RJ45-06R | 2007 m. liepos mėn. |
| Griebtuvo pusės signalo modulis | QCSM-RJ45-06G | 2008 m. liepos mėn. |
Servo maitinimo modulis
| Produkto pavadinimas | Modelis | PN |
| Roboto pusės servo maitinimo modulis | QCSM-08R1 | 7.Y02080 |
| Griebtuvo pusės servo galios modulis | QCSM-08G1 | 7.Y02081 |
Servo signalo modulis
| Produkto pavadinimas | Modelis | PN |
| Roboto pusės servo signalo modulis | QCSM-12R | 7.Y02082 |
| Griebtuvo pusės servo signalo modulis | QCSM-12G | 7.Y02083 |
Savaime užsandarinantis skysčio oro modulis
| Produkto pavadinimas | Modelis | PN |
| Roboto pusės signalo modulis | QCWM-02R | 7.Y02049 |
| Griebtuvo pusės signalo modulis | QCWM-02G | 7.Y02050 |
Mūsų verslas


Produktų kategorijos
-

„HITBOT“ ELEKTRINIO GRIEBTUVO SERIJA – Z-EFG-C5...
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS RGI SERIJA –...
-

GREITO KEIČIKLIO SERIJA – QCA-35 Greitas keitimas...
-

GREITO KEIČIMO SERIJA – QCA-S50 Greitas keitimas...
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS RGI SERIJA –...
-

DH ROBOTICS SERVO ELEKTRINIS GRIEBTUVAS PGC SERIJA –...