6 ašių roboto ranka, 5 kg naudingoji apkrova, bendradarbiaujanti roboto ranka. Bendradarbiaujanti roboto ranka.
6 ašių roboto ranka, 5 kg naudingoji apkrova, bendradarbiaujanti roboto ranka. Bendradarbiaujanti roboto ranka.
Pagrindinė kategorija
Pramoninė roboto ranka / Bendradarbiaujanti roboto ranka / Elektrinis griebtuvas / Pažangi pavara / Automatizavimo sprendimai
Paraiška
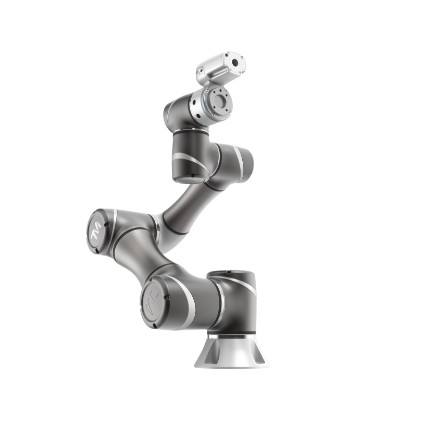
TM5-700 yra mūsų kompaktiškiausias bendradarbiaujantis robotas, kurį galima lengvai integruoti į bet kurią gamybos liniją. Sukurtas su įmontuota regėjimo sistema, specialiai pritaikyta lanksčioms gamybos reikmėms, reikalingoms mažų detalių surinkimui ir gamybos procesams plataus vartojimo elektronikoje bei plataus vartojimo prekėse. Mūsų robotas yra labai universalus mažoms ir vidutinėms įmonėms. TM5-700 dydis taip pat leidžia greitai diegti ir lengvai pritaikyti esamai gamyklos aplinkai.
Turėdamas savo klasėje pirmaujančią regos sistemą, pažangią dirbtinio intelekto technologiją, visapusišką saugumą ir paprastą valdymą, dirbtinio intelekto kobotas pakels jūsų verslą į aukštesnį lygį. Pakelkite automatizavimą į kitą lygį, padidindami produktyvumą, gerindami kokybę ir mažindami išlaidas.
Pristatome pažangią ir universalią 6 ašių robotinę ranką su išskirtine 5 kg keliamąja galia. Ši bendradarbiaujanti robotinė ranka keičia robotikos žaidimo taisykles. Dėl savo bendradarbiaujančios konstrukcijos ji gali lengvai prisitaikyti ir dirbti kartu su žmonėmis, todėl yra išties puikus įrankis įvairioms pramonės šakoms.
Šešių ašių robotinė ranka sukurta siekiant padidinti gamybos proceso našumą ir efektyvumą. Šešių ašių konstrukcija suteikia rankai platų judesių diapazoną, leidžiantį atlikti sudėtingas užduotis dideliu tikslumu. Nesvarbu, ar renkate mažus elektroninius komponentus, ar tvarkote sunkias mechanines dalis, ši robotinė ranka užtikrina išskirtinį našumą bet kokioje situacijoje.
Maksimali 6 kg keliamoji galia leidžia robotinei rankai valdyti įvairius objektus. Dėl to ji idealiai tinka pramonės šakoms, kuriose dirbama su įvairaus dydžio ir svorio produktais. Ji gali valdyti sunkesnius daiktus be rankinio kėlimo ir sumažina traumų darbo vietoje riziką. Naudodamos šią bendradarbiaujančią robotinę ranką, įmonės gali padidinti produktyvumą, kartu išlaikydamos saugią ir efektyvią darbo aplinką.
Ši koboto ranka yra unikali dėl savo gebėjimo bendradarbiauti. Ji aprūpinta pažangiais jutikliais ir saugos funkcijomis, kurios gali aptikti žmonių buvimą ir automatiškai koreguoti jos judesius, kad būtų užtikrintas aplinkinių saugumas. Ši funkcija leidžia žmonėms operatoriams dirbti kartu su robotine ranka, maksimaliai padidinant produktyvumą per efektyvų bendradarbiavimą.
6 ašių roboto ranka sukurta atsižvelgiant į patogumą naudoti. Ją lengva programuoti ir valdyti naudojant intuityvią programinę įrangą, todėl ja gali naudotis tiek patyrę technikai, tiek pradedantieji. Toks naudojimo paprastumas užtikrina sklandų integravimą į esamas gamybos linijas, sumažinant prastovas ir padidinant našumą.
Apibendrinant, 6 ašių robotinė ranka, galinti atlaikyti 5 kg keliamąją galią, pasižyminti bendradarbiavimu ir gebėjimu bendradarbiauti, yra puikus pasirinkimas įmonėms, norinčioms patobulinti savo gamybos procesus. Dėl savo universalumo, tikslumo ir saugumo ji yra neįkainojama priemonė įvairiose pramonės šakose. Padidinkite produktyvumą, pagerinkite saugą darbo vietoje ir supaprastinkite savo veiklą su šia aukščiausios klasės robotine ranka.
Savybės
IŠMANUS
Užtikrinkite savo koboto ateitį su dirbtiniu intelektu
• Automatinė optinė patikra (AOI)
• Kokybės užtikrinimas ir nuoseklumas
• Padidinti gamybos efektyvumą
• Sumažinti eksploatavimo išlaidas
PAPRASTAS
Patirtis nereikalinga
• Grafinė sąsaja lengvam programavimui
• Į procesą orientuotas redagavimo darbo eiga
• Paprastas rankų vedimas mokant pozicijų
• Greitas vizualinis kalibravimas naudojant kalibravimo plokštę
SAUGU
Bendradarbiavimas saugumu yra mūsų prioritetas
• Atitinka ISO 10218-1:2011 ir ISO/TS 15066:2016 standartus
• Susidūrimo aptikimas su avarinio stabdymo funkcija
• Sutaupykite lėšų ir vietos užtvaroms ir tvoroms
• Nustatykite greičio apribojimus bendradarbiaujančioje darbo vietoje
Dirbtiniu intelektu paremti kobotai atpažįsta savo aplinkos ir detalių buvimą bei orientaciją, kad galėtų atlikti vizualinius patikrinimus ir dinamines surinkimo bei įdėjimo užduotis. Nesunkiai pritaikykite dirbtinį intelektą gamybos linijoje ir padidinkite našumą, sumažinkite sąnaudas bei sutrumpinkite ciklo laiką. Dirbtinio intelekto regėjimas taip pat gali nuskaityti rezultatus iš mašinų ar bandymo įrangos ir atitinkamai priimti atitinkamus sprendimus.
Be automatizavimo procesų tobulinimo, dirbtinio intelekto valdomas bendradarbiaujantis robotas gali sekti, analizuoti ir integruoti duomenis gamybos metu, kad būtų išvengta defektų ir pagerinta produkto kokybė. Lengvai patobulinkite savo gamyklos automatizavimą naudodami visą dirbtinio intelekto technologijų rinkinį.
Mūsų bendradarbiaujantys robotai aprūpinti integruota regos sistema, suteikiančia kobotams galimybę suvokti aplinką, o tai žymiai pagerina kobotų galimybes. Roboto regėjimas, arba gebėjimas „matyti“ ir interpretuoti vaizdinius duomenis į komandų eilutes, yra viena iš savybių, dėl kurių mes esame pranašesni. Tai iš esmės keičiantis būdas tiksliai atlikti užduotis dinamiškai kintančiose darbo vietose, sklandžiau valdyti operacijas ir efektyviau automatizuoti procesus.
Sukurtas galvojant apie pradedančiuosius vartotojus, programavimo žinios nėra būtina sąlyga norint pradėti dirbti su dirbtiniu intelektu pagrįstu kobotu. Intuityvus spustelėjimo ir vilkimo judesys naudojant mūsų srautinio programavimo programinę įrangą sumažina sudėtingumą. Mūsų patentuota technologija leidžia operatoriams, neturintiems programavimo patirties, suprogramuoti projektą vos per penkias minutes.
Įmontuoti saugos jutikliai sustabdys dirbtinio intelekto kobotą, kai bus aptiktas fizinis kontaktas, taip sumažindami galimą žalą ir užtikrindami saugią aplinką be slėgio. Taip pat galite nustatyti roboto greičio apribojimus, kad jį būtų galima naudoti įvairiose aplinkose šalia jūsų darbuotojų.
Susiję produktai



Specifikacijos parametras
| Modelis | TM5M-700 | |
| Svoris | 22,1 kg | |
| Maksimali naudingoji apkrova | 6 kg | |
| Pasiekiamumas | 700 mm | |
| Jungtiniai diapazonai | J1, J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±155° | |
| Greitis | J1, J2, J3 | 180°/sek. |
| J4, J5, J6 | 225°/s | |
| Tipinis greitis | 1,1 m/s | |
| Maks. greitis | 4 m/s | |
| Pakartojamumas | ± 0,05 mm | |
| Laisvės laipsnis | 6 rotacinės jungtys | |
| Įvestis/išvestis | Valdymo dėžutė | Skaitmeninė įvestis: 16 Skaitmeninė išvestis: 16 Analoginis įėjimas: 2 Analoginis išėjimas: 1 |
| Įrankio jungtis. | Skaitmeninė įvestis: 4 Skaitmeninė išvestis: 4 Analoginis įėjimas: 1 Analoginė išvestis: 0 | |
| Įvesties / išvesties maitinimo šaltinis | 24 V 2,0 A valdymo blokui ir 24 V 1,5 A įrankiui | |
| IP klasifikacija | IP54 (roboto ranka); IP32 (valdymo dėžutė) | |
| Energijos suvartojimas | Įprasta 220 vatų | |
| Temperatūra | Robotas gali dirbti 0–50 ℃ temperatūros diapazone. | |
| Švara | ISO 3 klasė | |
| Maitinimo šaltinis | 22–60 V nuolatinė srovė | |
| Įvesties/išvesties sąsaja | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Bendravimas | RS232, Ethernet, Modbus TCP/RTU (pagrindinis ir pavaldinis), PROFINET (pasirinktinai), EtherNet/IP (pasirinktinai) | |
| Programavimo aplinka | TMflow, srautų diagrama | |
| Sertifikavimas | CE, SEMI S2 (pasirinktinai) | |
| Dirbtinis intelektas ir vizija*(1) | ||
| DI funkcija | Klasifikavimas, objektų aptikimas, segmentavimas, anomalijų aptikimas, dirbtinio intelekto OCR | |
| Paraiška | Padėties nustatymas, 1D/2D brūkšninių kodų nuskaitymas, OCR, defektų aptikimas, matavimas, surinkimo patikra | |
| Padėties nustatymo tikslumas | 2D padėties nustatymas: 0,1 mm*(2) | |
| Akis rankoje (įmontuota) | Automatiškai fokusuojama spalvota kamera su 5M raiška, darbinis atstumas 100 mm ~ ∞ | |
| Akis į ranką (nebūtina) | Palaiko daugiausia 2xGigE 2D kameras arba 1xGigE 2D kamerą + 1x3D kamerą*(3) | |
| *(1)Taip pat nėra įmontuotų regos robotų rankų TM5X-700, TM5X-900. *(2)Šioje lentelėje pateikti duomenys yra išmatuoti TM laboratorijoje, o darbinis atstumas yra 100 mm. Reikėtų atkreipti dėmesį, kad praktiškai atitinkamos vertės gali skirtis dėl tokių veiksnių kaip aplinkos šviesos šaltinis vietoje, objekto charakteristikos ir regėjimo programavimo metodai, kurie turės įtakos tikslumo pokyčiui. *(3)Informacijos apie su „TM Robot“ suderinamus kamerų modelius ieškokite oficialioje „TM Plug & Play“ svetainėje. | ||
Mūsų verslas


Produktų kategorijos
-

Suvirinimo roboto ranka su valdymo spintele, 6 ašių, ...
-

4 ašių „Delta“ roboto automatinis lygiagretus robotų p...
-

Kobotinis robotas, bendradarbiaujantis robotų manipuliatorius, 6...
-

Agv Robot Warehouse Montacargas Automatico Agv ...
-

3 kg naudingosios apkrovos bendradarbiaujanti roboto ranka robotas...
-

2022 m. karšto išpardavimo suvirinimo robotas 6 ašių automatinis MI...