STANDARTINIS AMRS – automobilinės mobiliosios bazės AMB-300XS

Pagrindinė kategorija
AGV AMR / kėlimo domkratas AGV AMR / AGV automatiškai valdoma transporto priemonė / AMR autonominis mobilus robotas / AGV AMR automobilis pramoniniam medžiagų tvarkymui / Kinijos gamintojas AGV robotas / sandėlio AMR / kėlimo domkratas lazerinė SLAM navigacija / AGV AMR mobilus robotas / AGV AMR važiuoklės lazerinė SLAM navigacija / išmanusis logistikos robotas
Paraiška

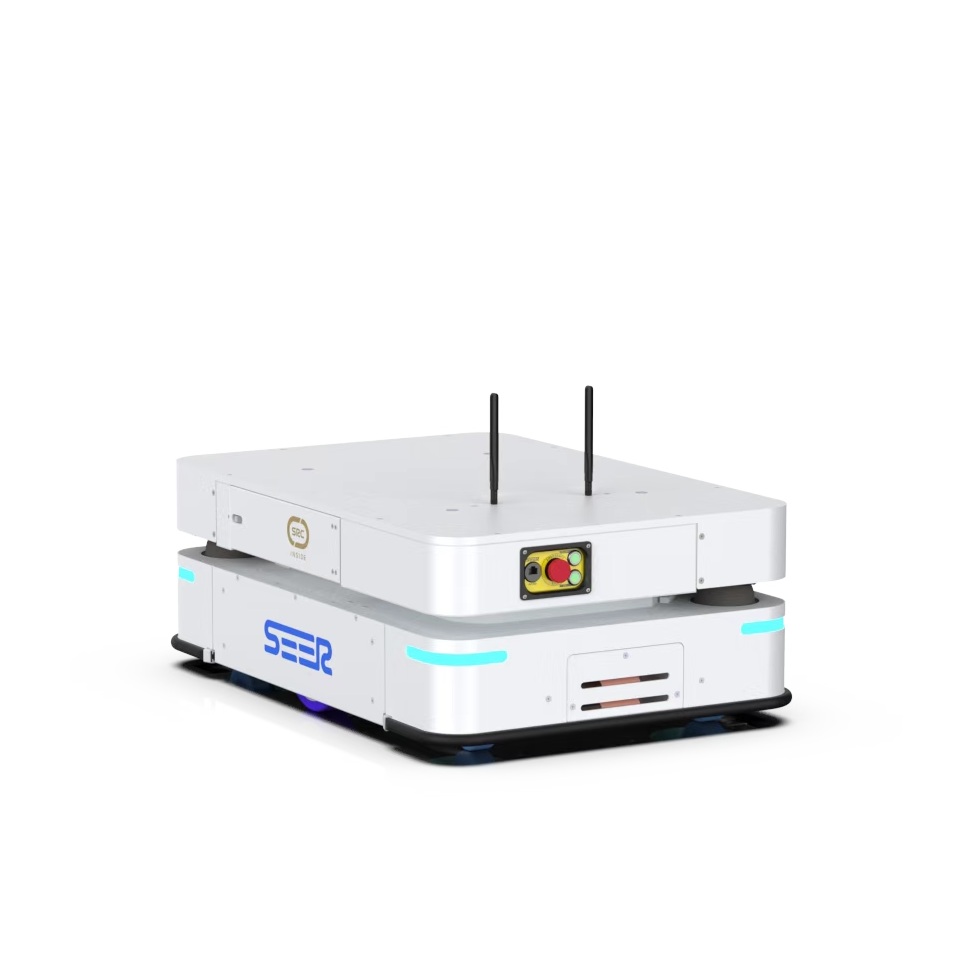
AMB serijos nepilotuojama važiuoklė AMB (Auto Mobile Base) autonominėms Agv transporto priemonėms – tai universali važiuoklė, skirta autonominėms Agv transporto priemonėms, turinti tokias funkcijas kaip žemėlapių redagavimas ir lokalizacijos navigacija. Ši nepilotuojama važiuoklė Agv vežimėliams turi daugybę sąsajų, tokių kaip įvesties/išvesties ir CAN, skirtų įvairiems viršutiniams moduliams montuoti, kartu su galinga kliento programine įranga ir dispečerinėmis sistemomis, kurios padeda vartotojams greitai pagaminti ir pritaikyti Agv autonomines transporto priemones. AMB serijos nepilotuojamos važiuoklės, skirtos Agv autonominėms transporto priemonėms, viršuje yra keturios tvirtinimo angos, kurios palaiko savavališką išplėtimą naudojant domkratus, volelius, manipuliatorius, latentinę trauką, ekraną ir kt., kad būtų galima pritaikyti vieną važiuoklę keliems tikslams. AMB kartu su SEER Enterprise Enhanced Digitalization gali realizuoti vieningą šimtų AMB produktų dispečerinį valdymą ir diegimą vienu metu, o tai labai pagerina gamyklos vidaus logistikos ir transportavimo išmanumą.
Funkcija

· Nominali apkrova: 300 kg
· Veikimo laikas: 12 val.
· Lidaro numeris: 2
· Sukimosi skersmuo: 972,6 mm
· Navigacijos greitis: ≤1,5 m/s
· Padėties nustatymo tikslumas: ±5,0,5 mm
● CE saugos sertifikavimas, išskirtinis veikimas ir puikūs saugos standartai pagal dizainą
CE sertifikatas (ISO 3691-4:2020) užtikrina aukščiausią kokybės ir saugos užtikrinimo lygį, kuris yra svarbus eksportui.
Įvesties/išvesties, CAN, RS485 ir kitos sąsajos yra skirtos aukštesnio lygio mechanizmo išplėtimui, kuris gali realizuoti įvairias robotų programas.
● Tikslus padėties nustatymas ±5 mm
±5 mm navigacijos padėties tikslumas ir 1,5 m/s navigacijos greitis padeda įmonėms dirbti efektyviai.
● Bendros funkcijos ir sklandus išplėtimas
Pagrindinės funkcijos apima žemėlapio redagavimą, modelio redagavimą, padėties nustatymą ir navigaciją, pagrindinį judėjimo modelį (diferencialą), periferinius plėtinius (ritinėlius, domkratus, latentinę trauką), sąsajas ir kt.
● 4 KLASĖS švara, patikimesnis
Išlaikyti ISO CLASS4 švaros testą, gali būti tiesiogiai naudojami didelės švaros reikalaujančiose pramonės šakose, tokiose kaip puslaidininkių pramonė.
● 3D kliūčių aptikimas, saugesnis
Siekiant dar labiau padidinti gaminio saugą, palaikomas 3D kliūčių aptikimas ir atšvaito navigacija.



Specifikacijos parametras
| Produkto modelis | AMB-150 / AMB-150-D | AMB-300 / AMB-300-D | AMB-300XS | |
| Pagrindiniai parametrai | Navigacijos metodas | Lazerinis SLAM | Lazerinis SLAM | Lazerinis SLAM |
| Važiavimo režimas | Dviejų ratų diferencialas | Dviejų ratų diferencialas | Dviejų ratų diferencialas | |
| Korpuso spalva | Perlų balta / Perlų juoda | Perlų balta / Perlų juoda | RAL9003 | |
| I * P * A (mm) | 800 * 560 * 200 | 1000 * 700 * 200 | 842*582*300 | |
| Sukimosi skersmuo (mm) | 840 | 1040 | 972,6 | |
| Svoris (su baterija) (kg) | 66 | 144 | 120 | |
| Keliamoji galia (kg) | 150 | 300 | 300 | |
| Minimalus pravažiuojamas plotis (mm) | 700 | 840 | 722 | |
| Našumo parametrai | ||||
| Navigacijos padėties tikslumas (mm*) | ±5 | ±5 | ±5 | |
| Navigacijos kampo tikslumas (°) | ±0,5 | ±0,5 | ±0,5 | |
| Navigacijos greitis (m/s) | ≤1,4 | ≤1,4 | ≤1,5 | |
| Baterijos parametrai | Baterijos specifikacijos (V/Ah) | 48/35 (trijų komponentų ličio) | 48/52 (trijų komponentų ličio) | 48/40 (trijų komponentų ličio) |
| Išsamus baterijos veikimo laikas (val.) | 12 | 12 | 12 | |
| Įkrovimo laikas (10–80 %) (10–80 %) (val.) | ≤2 | ≤ 2,5 | ≤ 2,5 | |
| Įkrovimo būdas | Rankinis / Automatinis / Jungiklis | Rankinis / Automatinis / Jungiklis | Rankinis / Automatinis / Jungiklis | |
| Išplėstinės sąsajos | Galia DO | Septynių krypčių (bendra apkrova 24 V / 2 A) | Septynių krypčių (bendra apkrova 24 V / 2 A) | Trijų krypčių (bendra apkrova 24 V / 2 A) |
| DI | Dešimties krypčių (NPN) | Dešimties krypčių (NPN) | Vienuolikakryptis (PNP/NPN) | |
| Avarinio stabdymo sąsaja | Dvipusis išėjimas | Dvipusis išėjimas | Dvipusis išėjimas | |
| Laidinis tinklas | Trijų krypčių RJ45 gigabito eternetas | Trijų krypčių RJ45 gigabito eternetas | Dvipusis M12 X-Code gigabitinis eternetas | |
| Konfigūracijos | Lidaro skaičius | 1 arba 2 | 1 arba 2 | 2 (SICK nanoScan3) |
| HMI ekranas | ● | ● | - | |
| Avarinio stabdymo mygtukas | ● | ● | ● | |
| Zirzeklis | ● | ● | - | |
| Kalbėtojas | ● | ● | ● | |
| Aplinkos šviesa | ● | ● | ● | |
| Buferio juostelė | - | - | ● | |
| Funkcijos | Tarptinklinis „Wi-Fi“ ryšys | ● | ● | ● |
| Automatinis įkrovimas | ● | ● | ● | |
| Lentynų atpažinimas | ● | ● | ● | |
| Lazerinio reflektoriaus navigacija | 〇 | 〇 | 〇 | |
| 3D kliūčių vengimas | 〇 | 〇 | 〇 | |
| Sertifikatai | ISO 3691-4 | - | - | ● |
| Elektromagnetinis suderinamumas / ESD | ● | ● | ● | |
| UN38.3 | ● | ● | ● | |
| Švara | - | ISO 4 klasė | ISO 4 klasė | |
* Navigacijos tikslumas paprastai reiškia roboto navigacijos į stotį pakartojamumo tikslumą.
● Standartinis 〇 Pasirinktinai Nėra
Mūsų verslas


Produktų kategorijos
-

IŠMANUSIS ŠAKINIS KRAUTUVAS – SFL-CBD15 lazerinis SLAM...
-

STANDARTINIS AMRS – automobilinės bazės AMB-150...
-

AMR/AGV režimas – naujos kartos automatinis...
-

KĖLIMO ROBOTAI – Lazerinis SLAM kėlimo robotas...
-

KĖLIMO ROBOTAI – Daugiakryptis kėlimo...
-

IŠMANUSIS ŠAKINIS KRAUTUVAS – SFL-CPD15-T lazerinis SLAM C...